Robot Path Planning in 2D World
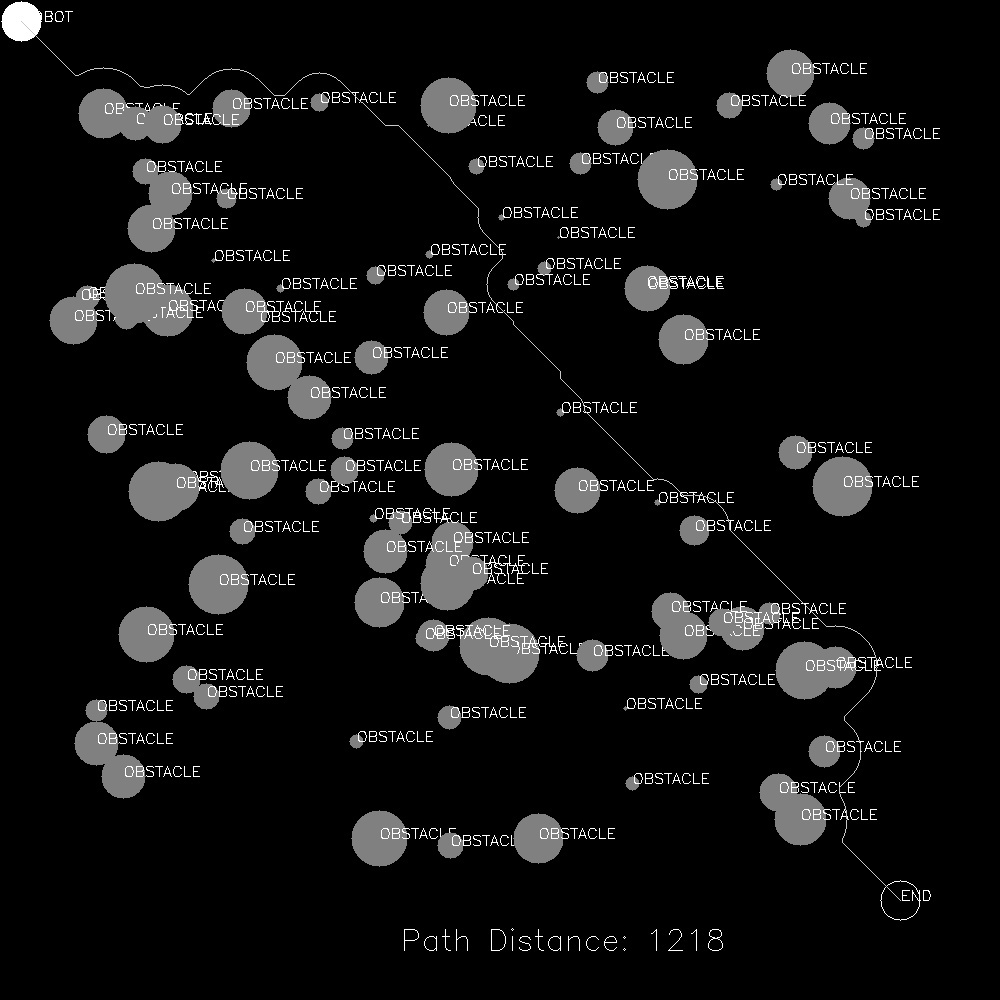
Used Djikstra’s algorithm and OpenCV to implement a basic shortest-path finding algorithm. The map and all objects are rendered with OpenCV datatypes.
Used Djikstra’s algorithm and OpenCV to implement a basic shortest-path finding algorithm. The map and all objects are rendered with OpenCV datatypes.